形态学处理-二值图像
# 二值图像处理的基本流程
# 二值图像的几何概念
主要关于二值图像的连接性和距离的相关概念
# 邻域和邻接
- 对于任意像素(i,j),把像素的集合(i+p,j+q) (p,q是一对适当的整数) 叫做(i,j)的邻域.
- 直观上看,邻域就是(i,j)附近的像素形成的区域.
- 最经常采用的是4邻域(上下左右)和8邻域(上下左右,对角线)

# 像素的连接
- 对于二值图像中,若具有相同值的两个像素A和B,所有和A、B具有相同值的像素系列p0(=A),p1,p2,...,pn−1,pn(=B)存在且pi−1和pi互为4/8邻接,那么像素A和B叫做4/8连接,以上的像素序列叫做4/8路径.
# 连接成分(连通成分)
在二值图像中,把互相连接的像素的集合汇集为一组,于是具有若干个0值的像素(0像素)和具有若干个1值的像素(1像素)的组就产生了.
这些组就是连接成分或连通成分.
连接性矛盾示意图
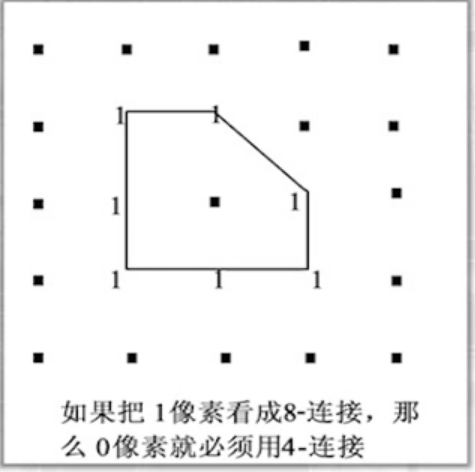
- 如果把1像素看成8连接,那么0像素就必须用4连接.
- 如果把1像素看成4连接,那么0像素就必须用8连接.
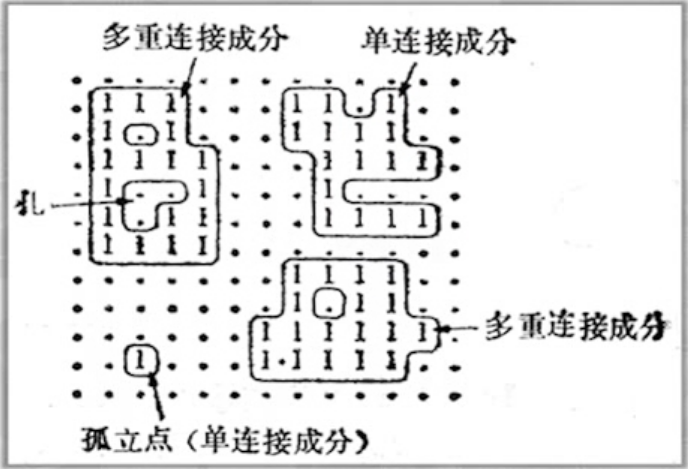
没有孔的连接成分称为:单重连接成分
具有孔的连接成分称为:多重连接成分
# 欧拉数
- 在二值图像中,1像素连接成分数C减去孔数H就叫做这幅图像的欧拉数或示性树.
- 对于一个1像素连接成分,1减去这个连接成分中所包含的孔数的插值就叫做这个1像素连接成分的欧拉数.
- 二值图像的欧拉数是所有1像素连接成分的欧拉数之和.
# 像素的可删除性和连接数
- 如果二值图像上的某个像素的值改变后,整个图像的连接性并不改变(各连接成分既不分离、不结合,孔也不产生、不消失),那么这个像素就是可删除的.
- 如何判断一个像素是否可删除?一般用像素的连接数来检测.
- 连接数:二值图像中某点p的像素值B(p)=1,则像素p的连接数Nc(p)为与p连接的连接成分数.
- 计算像素p的4/8邻接的连接数公式:
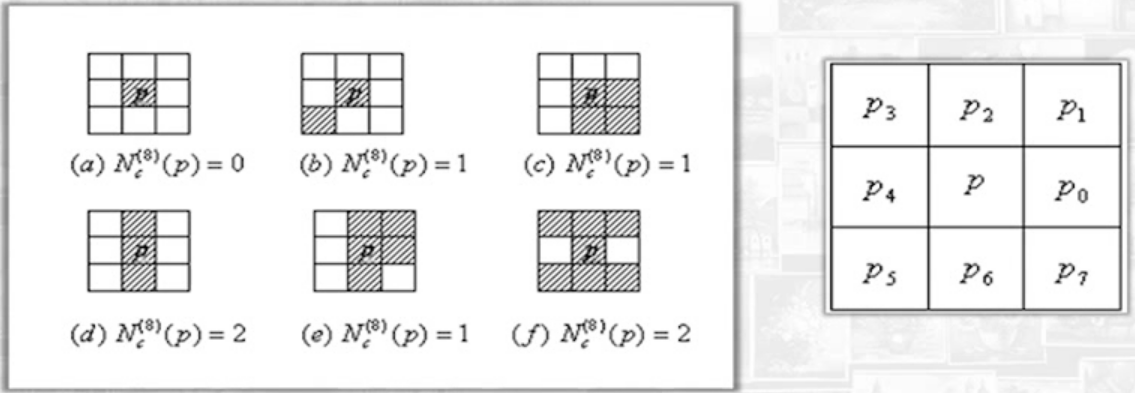
- 对于同一图像的像素,在4或8邻接的情况下,该像素的连接数不一定相同.
- 像素的连接数作为二值图像局部的特征量是很有用的.
- 像素按连接数Nc(p)的大小分类
- 孤立点:对于1像素点p,在4/8邻接的情况下,当其4/8邻接的像素全是0时,像素p为孤立点.其连接数Nc(p)=0
- 内部点:对于1像素点p,在4/8邻接的情况,当其4/8邻接的像素全是1时,称为内部点,内部点的连接数Nc(p)=0
- 边界点:在1像素中, 除开孤立点和背景点1≤Nc(p)≤4.
- 删除点或端点:Nc(p)=1;
- 连接点:Nc(p)=2
- 分支点:Nc(p)=3
- 交叉点:Nc(p)=4
- 背景点:把所有像素值B(p)=0的像素叫做背景点
| 示例图 | |
|---|---|
| p1——孤立点 p2——内部点 p3-6——边界点 连接数1,2,3,4 p7——背景点 | 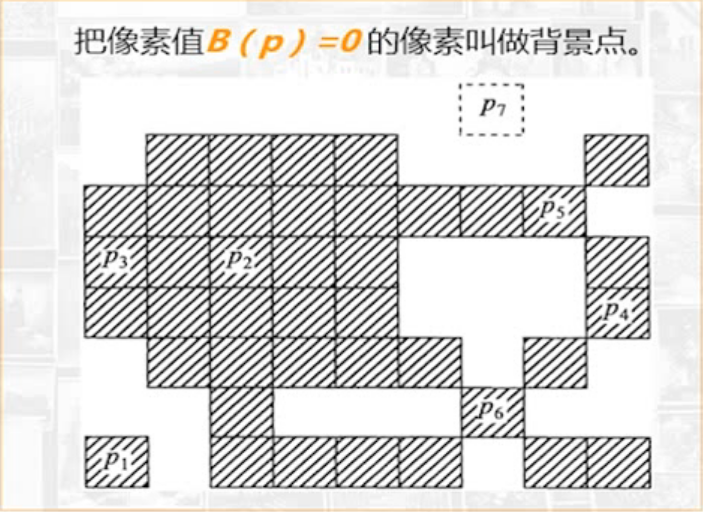 |
# 距离
- 对于集合S中的两个元素p和q,当函数D(p,q)满足下式时,就把D(p,q)叫做p和q的距离,也称为距离函数.
- 常用计算方法
| 欧几里得距离 | 4-邻域距离(街区距离) | 8-邻域距离(棋盘距离、国际象棋) | 八角形距离(结合d4和d8) |
|---|---|---|---|
| de[(i,j),(h,k)]=((i−h)2+(j−k)2)21 | $d_4[(i,j),(h,k)] =\ | i-h | + |
 |  |  |  |
| 大致圆形 | 倾斜45°正方形 | 正方形 | 八角形 |
- d8≤d4≤de
# 二值图像连接成分的各种变形算法
为了从二值图像中准确地提取有的特征,一般的需要对二值图像进行一些增强处理,这就是二值图像连接成分的变形操作
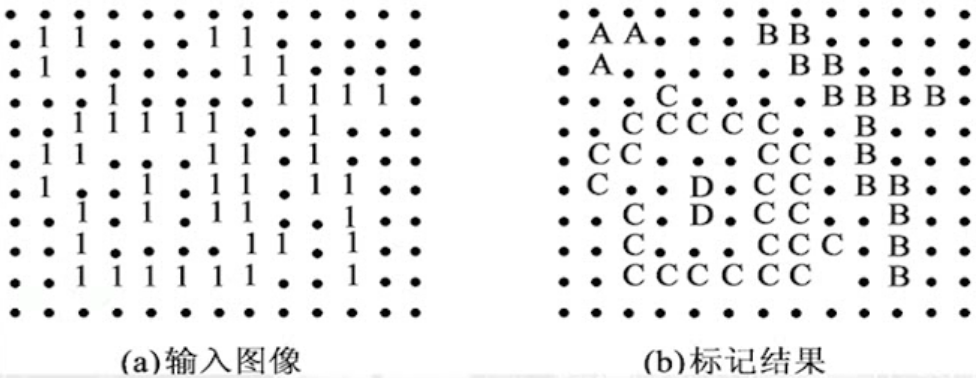
# 连接成分的标记
- 为了区分二值图像中的连接成分,求得连接成分的个数,对属于同一个1像素连接成分的所有像素分配相同的编号,不同的连接成分分配不同的编号的操作.
# 膨胀与收缩
| 膨胀 | 腐蚀 |
|---|---|
| 把连接成分的边界扩大一层的处理 | 把连接成分的边界点去掉而缩小一层的处理 |
| $g(i,j) = \begin{cases}1,there\ is \ one\ '1'\ at \ last \in \ S_4\ or\ S_8 \\[2ex]0,other\end{cases}$ | $g(i,j) = \begin{cases}0,there\ is \ one\ '0'\ at \ last \in \ S_4\ or\ S_8 \\[2ex]1,other\end{cases}$ |
膨胀和收缩的反复使用就可检测或清除二值图像中的小成分或孔

- 先膨胀后收缩:填平小沟,弥合空洞和裂缝.
- 先收缩后膨胀:去掉图中的孤立点的毛刺.
# 线图形化
距离变换和骨架化处理
- 把任意图形转换成线划图的最有效方法之一.是求二值图像中各1像素到0像素的最短距离的一种处理.
- 在经过距离变换得到的图像中,最大值点的集合就形成1像素区域的骨架.
- 骨架反映了原图形的形状,给定距离和骨架就能恢复该图形,但恢复的图形不能保证原始图像的连接性。
- 距离变换和骨架化处理常用于图像压缩、提取图形幅度和形状特征等.

细化
从二值图像中提取线宽为1的1像素的中心线的操作.
从处理方法上分为顺序处理和并行处理,从连接性上分为8-邻接细化和4-邻接细化.
介绍一种8-邻接细化中有代表性的一种方法-希尔迪奇(Hilditch)方法
- 设像素(i,j)记为p0,其8-邻域的像素用pk,k=1,2,3,4,5,6,7,8表示 $$ \left[ \begin{matrix} p_4 & p_3 & p_2 \ p_5 & p_0 & p_1 \ p_6 & p_7 & p_8 \end{matrix} \right] $$
二值图像的细化步骤
- 按光栅扫描顺序研究二值图像的像素p0,当p0完全满足以下六个条件时,把p0的值B(p0)置换成−1,注意,条件2、3和5是在并行处理方式中所用的各像素的值,条件4、6是在顺序方式中所有的各像素的值.
- 对已置换成−1的像素,在不用当前处理结果的并行处理方式中,把该像素的值复原到1,而在用当前处理的结果的顺序处理方式中,仍为-1.
- 6个条件
- p0的值必须等于1.
- p0是边界像素的条件,即∑
- 这是在上你xx的课.
# 边界跟踪
为了求得区域间的连接关系,必须沿区域的边界点跟踪像素,这个过程称之为边界跟踪或边缘跟踪.
具体方法和步骤
- 根据光栅扫描发现像素从0开始变为1的像素p0时,p0作为边界的起点,存储他的坐标(i,j)值.
- 从像素(i,j−1)开始逆时针方向在像素(i,j)的8-邻域寻找1像素,当第一次出现1像素记为pk,存储pk的坐标.
- 逆时针方向从pk−1以前的像素开始在pk像素的8-邻域内寻找1像素,把最先发现像素值为1的像素记为pk+1.
- 当pk=p0而且pk+1=p1时,跟踪结束,在其他情况下,把k+1重新当做k返回第3步,反复进行处理.

S1和S2表示光栅扫描,S3表示以p0为中心逆时针扫描,S4表示p1为中心逆时针扫描,S5表示以p2为中心逆时针扫描,S6表示以p3为中心逆时针扫描.
二值图像的边界跟踪是在图像边缘连接明确的假设下进行的,但实际上很多图像的边缘连接并不是明显的.这时可以使用__浓淡图像直接跟踪边缘__,但必须同时进行边缘检出(根据图像斜率的大小和方向跟踪边缘的像素).
# 形状特征提取(区域内部形状提取与分析)
二值图像特征提取与描述的各种方法
- 对图像中的具体目标提取形状特征,进而对图像进行识别和理解.
- 提取方法
区域内部形状特征提取
空间域分析:直接在图像的空间域对区域内部提取形状特征,以便于分析.
拓扑描述子:欧拉数,对区域的全局描述很有用.
凹凸性:
- 连接图形内任意两个像素的线段,如果不通过这个图像意外的像素,则这个图像就是凸的.
- 包含一个图形的最小的凸图形称为这个图形的凸闭包,凸图形的凸闭包就是他本身.
- 从凸闭包出去原始图形后,所产生的图像的位置和形状是形态特征分析的重要线索.
区域的测量
- 面积:区域的面积就是区域内像素点个数的总和
- 周长
- 第一种方法:在区域的边界像素中,设某像素与其上下左右像素间的距离为1,与斜方向像素间的距离为2,周长就是这些像素间距离的总和.
- 第二种方法:将边界的像素总和作为周长.
- 圆形度:
R=4π(周长)2面积如果区域为圆形,这时R=1,取得最大,如果区域为一个细长的区域,则R较小
- 常用的特征量还有区域的__直径__、__幅宽__和__占有率__等.
区域内部变换法:
- 是形状分析的经典方法,包括求区域的__各阶统计矩__、__投影__和__截口__等.
- 矩法:函数f(x,y)的p+q阶矩定义式为:
mpq=∫−∞+∞∫−∞+∞xpyqf(x,y)dxdyp,q∈N0={0,1,2,...}则大小为n×m的数字图像f(i,j)的矩为:
mpq=i=1∑nj=1∑mipjqf(i,j)0阶矩m00是图像灰度的总和,二值图像的m00表示__对象物的面积__. 如果有m00来归一化1阶原点矩阵m10及m01,则可以得到中心坐标(iG,jG). $$ i_G = \frac{m_{10}}{m_{00}},j_G = \frac{m_{01}}{m_{00}} $$ 目标形心:是一个关键性的位置参数,它的精确与否直接影响到目标定位,可以用矩方法来确定. 定义中心距为: $$ M_{pq} = \sum_{i=1}^{n}\sum_{j=1}^{m} (i-i_G)^p(j-j_G)^qf(i,j) $$ 中心距能反映灰度相对于灰度中心是如何分布的. 利用中心矩可以提取一些区域的一些基本形状特征:延伸方向,对称轴. 艹xx的7个不变矩(Hu.M.K 对于平移、旋转和大小尺度变换均不变的矩组)
归一化中心距定义式为: $$ \eta_{pq}=\frac{M_{pq}}{M_{00}^r}\ r = \frac{p+q}{2+1} $$ 求7个不变矩......
7个不变矩在图像发生变化时,其数值基本保持不变。
计算量较大,很少用.
- 投影和截口
对于区域为n×n的二值图像f(i,j),其在i轴上的投影 $$ p(i)=\sum_{j=1}^{n}f(i,j),i=1,2,...,n $$
在j轴上的投影为: $$ p(j) = \sum_{i=1}^{n}f(i,j),j=1,2,...,n $$
投影p(i)和p(j)都是__离散波形曲线__,这样把对二值图像的形状分析转化为对一维离散曲线的波形分析.
如果我们固定i,假定为i0,可得到图形f(i,j)过i0而平行于j轴的截口f(i0,j),j=1,2,..,n
也可以固定j0,可得到图形f(i,j)过j0而平行于i轴的截口f(i,j0),i=1,2,...,n
截口函数所绘出的曲线也是两个一维离散波形曲线.
二值图像的截口长度定义:
s(i0)=j=1∑nf(i0,j)s(j0)=i=1∑nf(i,j0)如果投影和截口都通过f(i,j)中的区域,那么上述的公示均是局域的__形态特征__.
在分析染色体图像时,着丝点(凹点)位置是一个关键特征,用投影方法可以提取着丝点的位置.
后面的没有找到视频提及.
区域外部形状特征提取
- ???
利用图像层次型数据结构,提取形状特征(略).

